Angles orientés dans l'espace euclidien

Bonsoir,
$E$ est l'espace euclidien ordinaire d'origine $O$.
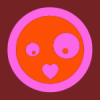
Soit $C$ un cercle de centre $O$ et de rayon $1$.
En choisissant un vecteur $\vec n$ normal au plan $P$ contenant $C$ on arrive à orienter le cercle $C$.
Et si on prend $A$ et $B$ deux points de $C$ on peut définir l'angle orienté $(\vec{OA},\vec{OB})$ et ses mesures suivant cette orientation par $\vec n$.
D'après la figure : $(\vec{OA},\vec{OB})_{\vec n} \equiv \frac \pi 2 [2\pi]$ et $(\vec{OA},\vec{OB})_{-\vec n} \equiv - \frac \pi 2 [2\pi]$.
Le problème c'est que dans chaque cercle $C$ d'origine $O$ et de rayon $1$ il faut choisir entre $\vec n$ et $-\vec n$.
Comment éviter ce double choix ?
$E$ est l'espace euclidien ordinaire d'origine $O$.
Soit $C$ un cercle de centre $O$ et de rayon $1$.
En choisissant un vecteur $\vec n$ normal au plan $P$ contenant $C$ on arrive à orienter le cercle $C$.
Et si on prend $A$ et $B$ deux points de $C$ on peut définir l'angle orienté $(\vec{OA},\vec{OB})$ et ses mesures suivant cette orientation par $\vec n$.
D'après la figure : $(\vec{OA},\vec{OB})_{\vec n} \equiv \frac \pi 2 [2\pi]$ et $(\vec{OA},\vec{OB})_{-\vec n} \equiv - \frac \pi 2 [2\pi]$.
Le problème c'est que dans chaque cercle $C$ d'origine $O$ et de rayon $1$ il faut choisir entre $\vec n$ et $-\vec n$.
Comment éviter ce double choix ?
Réponses
-
en définissant le cercle par un quaternion
-
Dans l'espace, seuls les angles géométriques sont légitimes (mesure modulo $\pi$).
-
Un lien ici vers une ancienne discussion : http://www.les-mathematiques.net/phorum/read.php?8,406730,409499.
On y dit que le choix du vecteur normal n'est pas naturel (on peut aussi bien prendre l'un ou l'autre).
Petit ajout :
Dans le plan, on ne peut pas orienter chaque droite (on peut trouver une isométrie directe qui transforme une droite en elle-même et qui ne conserve pas l'orientation de la droite).
Dans l'espace, le même problème arrive avec les plans. -
Il y a (c'est habituel) confusion entre angle orienté et mesure d'un angle orienté. Dans le plan $(OAB)$, l'angle orienté $(\vec{OA},\vec{OB})$ est parfaitement défini sans qu'il y ait besoin d'orienter le plan. La preuve : la rotation d'axe la perpendiculaire au plan $(OAB)$ passant par $O$ et d'angle $(\vec{OA},\vec{OB})$ est parfaitement définie.
C'est quand on veut parler de la mesure de l'angle orienté $(\vec{OA},\vec{OB})$ qu'il y a besoin d'orienter le plan $(OAB)$ (ce que l'on peut faire à l'aide d'une orientation de l'espace ambient et d'une orientation de l'axe). -
Résumons :
- L'angle orienté $(\vec{OA},\vec{OB})$ est orienté de nature de $\vec{OA}$ vers $\vec{OB}$.
- Pour donner un sens à sa mesure on a besoin d'orienter son plan $OAB$.
- Il y a un problème d'orientation des plans de l'espace.
Et si pour calculer la mesure de l'angle $(\vec{OA},\vec{OB})$ on oriente le plan $OAB$ par le vecteur normal $\vec{OA} \wedge \vec{OB}$. C'est à dire que le même plan peut être orienter de deux façons différentes suivant l'angle que ce plan contient. -
Petit bémol : quand je parle d'angle orienté $(\vec{OA},\vec{OB})$, c'est dans le plan $(0AB)$. Dans l'espace de dimension 3, pas de distinction entre angle orienté et non-orienté !
Les deux dernières lignes du message me laissent perplexe. Où vas-tu ? -
Dans les deux dernières lignes je n'ai pas préciser une chose :
La mesure de l'angle $(\vec{OA},\vec{OB})$ ne peut pas être un simple nombre réel, c'est la donnée de deux paramètres, un vecteur unitaire $\vec n$ normal au plan $(OAB)$ et un nombre réel $\theta$ mesure de cette angle suivant $\vec n$. le problème c'est comment unifier ces deux grandeurs pour créer un seul objet qu'on peut appeler ensuite MESURE de $(\vec{OA},\vec{OB})$. -
La mesure de tout angle orienté du plan est bien définie (comme élément de $\R/2\pi \Z$) une fois l'orientation du plan fixée.
Je ne vois toujours pas où tu vas. -
Permettez-moi d'écrire cette convention : MESURE de $(\vec{OA},\vec{OB})$ est $(\theta , \vec n)$
avec $\vec n=\frac{\vec{OA} \wedge \vec{OB}}{||\vec{OA} \wedge \vec{OB}||}$ et $(\vec{OA},\vec{OB})_{\vec n} \equiv \theta [2\pi]$
$(\theta_1 , \vec n_1) \equiv (\theta_2 , \vec n_2) [2\pi]$ $ \Longleftrightarrow$ $\vec n_1=\vec n_2 $ et $\theta_1 \equiv \theta_2 [2\pi]$ -
Remarques :
1°) Si tu choisis le vecteur $\vec{OA}\wedge \vec{OB}$, pour orienter le plan $(O,A,B)$ la mesure de l'angle sera toujours dans $]0,\pi [$ modulo $2\pi$
2°) Pour rendre $\vec{OA}\wedge \vec{OB}$ unitaire, encore faut-il qu'il ne soit pas nul.Tu auras quelques ennuis quand l'angle géométrique des deux vecteurs est $0$ ou $\pi$.
3°) Qu'est-ce qu'un angle pour toi ? Je veux dire, quand est-ce que l'angle $(\vec{OA}, \vec{OB})$ est égal à l'angle $(\vec{OA'}, \vec{OB'})$ ? -
Hello. Juste pour détendre l'atmosphère (?). C'est un passage de Dieudonné, Algèbre et géométrie élémentaire, Hermann, 1968. J'avais bien apprécié le coup de la droite qui se souvient d'avoir tourné de 26$\pi$ Je viens de faire du coupé-collé et j'ai eu la flemme de faire une remise en forme.
Je cite :
Quant à la soi-disant ``mesure'' des angles, elle s’inscrit dignement dans la confusion générale qui règne à ce propos ; pour le mathématicien pro-fessionnel, alors que la nature nous offre gratuitement, avec le groupe des rotations planes, un admirable exemple de groupe infini possédant des éléments d’ordre fini quelconque, c’est une insondable sottise que de chercher à tout prix à masquer ce fait essentiel en prétendant ``mesurer'' ce qui n’est pas mesurable, introduire un``ordre'' l`a où il n’y en a pas et feindre de croire qu’une droite se souvient d’avoir tourné de 26$\pi$ lorsqu’elle est revenue à la même position.
Et il y avait aussi son fameux coup, en Appendice, où la nuit (c'est moi qui dit), il remplaçait (sans rien dire à personne, c'est moi qui dit), le corps $\mathbb R$ par une extension assez grosse $K$ de $\mathbb Q$, contenant des racines carrées à profusion, permettant de ``continuer faire de la géométrie comme d'habitude'' mais sans pouvoir mesurer les angles (i.e. le seul morphisme $(K, +) \to (\mathrm {SO}_2(K), \circ)$ était le morphisme trivial). Mais je n'arrive pas à le trouver sur le net. Quel farceur ce Dieudonné.
Aucun rapport avec la choucroute ? Peut-être. Sorry (il fait chaud). -
GaBuZoMeu :
- Pour le point (1), je l’accepte et je le pose comme contrainte (je n'ai pas d'autre solution pour le moment).
- Point (2), C'est un cas particulier facile à traiter.
- Point (3), $(\vec{OA},\vec{OB}) = (\vec{OA'},\vec{OB'})$ $ \Longleftrightarrow$ $\frac{\vec{OA} \wedge \vec{OB}}{||\vec{OA} \wedge \vec{OB}||} = \frac{\vec{OA'} \wedge \vec{OB'}}{||\vec{OA'} \wedge \vec{OB'}||}=\vec n$ et $(\vec{OA},\vec{OB})_\vec n \equiv (\vec{OA'},\vec{OB'})_\vec n [2\pi]$. en supposant que $\vec n$ est non nul. -
J'ai quelques carences quant aux quaternions.
En quoi un quaternion apporterait une plus value ? -
Tes angles sont plutôt des rotations. Et coder une rotation par une paire de quaternions unitaires opposés, ou une droite vectorielle (sur $\R$) de quaternions, c'est bien connu, non ?
Je ne vois toujours pas où tu vas. -
Il y a une bijection entre les quaternions unitaires ($e^{\theta \vec n}$)et les angles orientés :
$\vec n$ représente la normal au plan de l'angle et $\theta$ est la mesure de cet angle suivant $\vec n$. -
Mon problème était que je voulais à tout prix forcer un angle orienté dans l'espace à avoir une mesure, ce n'est pas très utile (on n'invente pas les maths).
-
C'est intéressant, mais GaBuZoMeu se tue à te dire qu'il n'y a pas d'angles orientés dans l'espace !
Bruno -
Je dis angles orientés par respect aux géomètres qui travaillent avec des angles géométriques $[AOB]$.
Mais ça me dérange pas de dire angle tout court pour désigner $(\vec{OA},\vec{OB})$. -
Précision (Bruno et GaBuZoMeu): On doit se mettre d'accord sur le mot (orienté) et (il n'y a pas d'angles orientés dans l'espace).
Quand je dis angle orienté $(\vec{OA},\vec{OB})$ Je veux dire orienté du vecteur $\vec{OA}$ vers $\vec{OB}$ c'est à dire que cet angle se comporte comme un vecteur, ça n'a rien à voir avec l'orientation du plan et c'est comme si je dis le vecteur orienté $\vec{AB}$.
Par contre la distance$AB$ n'est pas orientée comme les angles géométriques $[AOB]$.
Et c'est quoi les angles de l'espace s'ils ne sont pas orientés ? -
TOUT COURT : Un angle orienté dans l'espace = un angle vecteur ( Il obéit à la relation de Chasles)
-
Tu tournes en rond, c'est le moment de le dire. Tant pis (pour toi).
Mon conseil final : apprends dans un bon livre de géométrie ce que sont les angles, et les rapports entre quaternions et rotations. -
Est-ce que la phrase : Il y a une bijection entre les quaternions unitaires ($e^{\theta \vec n}$)et les angles orientés de mesure $\theta$ suivant $\vec n$.
Signifie la phrase : Un quaternion unitaire ($e^{\theta \vec n}$) représente une rotation d'angle $2\theta$ dans l'espace.
J'ai jamais fait de conjugaison par quaternion $qvq^{-1}$ dans mes interventions.
Le problème n'est pas que l'un convainc l'autre, mais que chacun comprend ce que l'autre dit même si c'est faux.
Moi je vous comprends très bien. -
Je viens de lire : Il est impossible de donner une bonne théorie des angles orientés dans l’espace.
Bon j'accepte, je m’arrête de penser aux angles orienté dans l'espace.
Mais Avant 1905, ils disaient aussi que le temps est absolu et n'est pas malléable. -
Les angles orientés dans l'espace dont je parlais sont uniquement ceux qui ont pour sommet l'origine $O$.
-
- Vous me donnez une rotation d'angle $\theta$ dans l'espace et je vous retourne deux quaternions unitaires opposés d'arguments $\frac{\theta}{2}$ et $\frac{\theta}{2}-\pi$ définissant cette même rotation.
-
Les quaternions unitaires $i$ , $j$ et $k$ sont les angles $(\vec{OB},\vec{OC})$, $(\vec{OC},\vec{OA})$ et $(\vec{OA},\vec{OB})$ .
-
Je te donne l'"angle" $(\vec{OA},-\vec{OA})$, tu me retournes quel quaternion unitaire ?
-
Bonjour
Je ne savais pas qu'un quaternion unitaire était un angle!L2M a écrit:
Les quaternions unitaires $i$ , $j$ et $k$ sont les angles $(\vec{OB},\vec{OC})$, $(\vec{OC},\vec{OA})$ et $(\vec{OA},\vec{OB})$ .
Je croyais naïvement que c'était un point de la sphère-unité $\mathbb S^3\subset \mathbb R^4$ et qu'on avait un homomorphisme de groupes, revêtement à deux feuillets non trivial: $\mathbb S^3\mapsto SO(3)$
Mais tout ceci est loin maintenant et les choses ont peut-être changé depuis!
Amicalement
[small]p[/small]appus -
Soit $E$ un ensemble. Sur $F:=E^2$, il y a une fonction $+$ canonique définie sur une partie de $F^2$, à valeurs dans $F$, qui est commutative, associative et qui vérifie $\forall x,y,z$ dans $E: (x,y)+(y,z)=(x,z)$ (celle qui est la plus petite ainsi). On n'est d'ailleurs pas obligé d'exiger qu'elle soit commutative.
Cette démarche peut aider, donc je la signale, c'est tout. En gros, ça permet de "combattre" les tendances à confondre $(a,b)$ avec $(b,a)$ à peu de frais.
Concernant des angles de vecteurs, je n'ai lu qu'en diagonale, mais j'ai vu que les intervenants qui te répondent insistaient pour que tu notes bien qu'il n'y a pas d'angles orientés dans l'espace. Je pense que ce qu'il y a derrière ce message c'est que pour deux vecteurs $a,b$ quelconques, $(a,b)$ "s'obtient" à partir de $(b,a)$ par une rotation (donc un déplacement direct). Ce n'est pas une convention!Aide les autres comme toi-même car ils sont toi, ils sont vraiment toi -
Je m'adressais évidemment à L2M et je salue Pappus, GBMZ, dom, Bruno ;-) qui confirmeront ou infirmeront la pertinence de la suggestion que je te fais.Aide les autres comme toi-même car ils sont toi, ils sont vraiment toi
-
Pour GaBuZoMeu et l'angle $(\vec{OA},-\vec{OA})$ :
$(\vec{OA},-\vec{OA})$ et $(\vec{OB},-\vec{OB})$ $(\vec{OC},-\vec{OC})$ sont tous $-1$ -
@christophe c :
Ces angles sont des vecteurs, muni de $+$ forme un "groupe non commutatif". C'est une somme qui sert à calculer le produit des quaternions par la loi $(a,b)+(b,c)=(a,c)$. -
$(a,b)$ est l'opposé de $(b,a)$ et pour leurs quaternions l'un est le conjugué de l'autre.
Ou tout simplement le quaternion $q$ lié à l'angle $(a,b)$ peut s'écrire : $q=e^{(a,b)}$
Et vous pouvez tester ceci en prenant des exemple simple ou complexes : $qq'=e^{(a,b)}e^{(b,c)}=e^{(a,b)+(b,c)}=e^{(a,c)}$
Je dois faire un changement pour que ça marche cette écriture exponentielle, désolé. -
Conclusion Un angle d'origine $O$ est "l'argument généralisé" d'un quaternion.
-
Dire que l'on ne considère que des angles de sommets O revient à étudier les rotations vectorielles.
Et le problème est le même.
Reprenons :
Dans le cas général, on part des rotations, identifiés à SO(n).
Avec une identification on définit un angle comme étant une rotation.
On se donne deux vecteurs $u$ et $v$ et on regarde s'il existe une rotation qui transforme $u$ en $v$.
Le cas n=2 est particulier (pourquoi ?). -
Un angle est une rotation.
La confusion est dans la façon d'identifier les rotations (ou angles) et les quaternions unitaires. -
@christophe c : Pour ta fonction $+$, il existe en effet mais il faut faire un petit changement dans la définition des angles que je viens de donner pour qu'elle respecte $(a,b)+(b,c)=(a,c)$ :
Elle a toutes les propriété d'un groupe sauf qu'elle est non commutative. (c'est normal parce qu'il sers à définir le produit des quaternions qui n'est pas commutatif.
Pour moi : (angles orientés) c'est (angle de deux vecteurs) et l'ordre des vecteurs est important. -
On va considérer vecteurs d'origine O, dans l'espace.
Je note (O;i,j,k) un repère.
@L2M
Quelles sont selon toi les mesures de ces angles "orientés" ?
(i,j)
(j,i)
(i,k)
(j,k)
(k,j)
(k,i).
Rappel :
Dans le plan muni du repère (O,i,j), les angles orientés (i,j) et (j,i) sont distincts car aucune rotation ne permet de passer de l'un à l'autre. Le passage aux mesures, une fois le plan orienté, donne deux mesures distinctes $\frac{\pi}{2}$ et $\frac{3\pi}{2}$. -
Ok, je ne dirais plus angle orienté.
Mais l'angle $(\vec i,\vec j)$ je le prend comme un objet géométrique formé de deux vecteur (pas besoin de sa mesure).
Quand on prend le vecteur $\vec{AB}$ ou le segment $[AB]$ ce sont des objets visuels qu'on peut définir par deux points bien définis sans savoir leurs mesures. -
Un grand merci à vous.
Statistiquement 1 contre ?? veut dire que ce que j'ai dis n'est pas clair et fort probablement faux. Je déteste insister sur une chose que tout le monde refuse. Peut être que je dois utiliser des termes bien précis que les autres acceptent et reformuler tout.
Pour ceux qui aime faire les maths (oubliez ce que j'ai dit avant) : Supposez qu'on peut dessiner les quaternion unitaire dans l'espace réel ! Je vous laisse vous, tenter de le faire à votre manière professionnelle.
Amicalement -
En effet, ton message sur "pas besoin de mesure" me convient très bien.
Et d'ailleurs, ma première phrase dans mon "rappel" ne parle pas de mesure et donne une demonstration du fait que les deux couples sont distincts (modulo la rotation etc.). -
Bon, il y a des choses qu'in peut formaliser.
Dans tout ce qui suit on identifie $\R^3$ avec sa structure euclidienne orientée canonique avec l'espace des quaternions purs.
1°) Définition : Un elgna est une classe d'équivalence de couples de vecteurs unitaires de $\R^3$ ; deux couples $(u,v)$ et $(u',v')$ représentent le eême elgna si et seulement s'il existe un plan vectoriel contenant $u,v,u',v'$ et une rotation de ce plan qui envoie $u$ sur $u'$ et $v$ sur $v'$. Notons $\epsilon(u,v)$ l'elgna représenté par $(u,v)$.
Pétition : les elgnas sont ce dont veut parler L2M sous l'appellation impropre d'" angles".
Remarque : tous le $(u,u)$ représentent le même elgna, tous les $(u,-u)$ représentent le même elgna.
2°) A un elgna représenté par $(u,v)$ on associe le quaternion $u\cdot v+ u\wedge v$ ($u\wedge v$ est la partie quaternion pur). Cette application est bien définie et est une bijection de l'ensemble des elgnas sur l'ensemble des quaternions de norme 1. Notons la $\mu$.
Remarque : $\mu(\epsilon(u,u))=1$, $\mu(\epsilon(u,u))=-1$.
3°) On a une opération bien claire sur les quaternions de norme 1 : le produit.
On aurait envie de définir l'opération suivante sur les elgnas : étant donnés deux elgnas, on peut toujours trouver des représentants tels que le 1er vecteur du premier soit égal au 2e vecteur du second. On pose alors $\epsilon(u,v)\circ \epsilon(w,u)=\epsilon(w,v)$ (une sorte de Chasles : aller de $w$ à $u$ puis de $u$ à $v$ est aller de $w$ à $v$). Cette opération est bien définie, mais avec ça $\mu$ n'est pas un isomorphisme !
4°) Et les rotations dans tout ça ? Soit $r$ une rotation de $\R^3$. Soit $u$ un vecteur unitaire orthogonal à l'axe de $r$. On peut appeler "elgna de $r$' l'elgna $\epsilon(u,r(u))$ (indépendant du choix de $u$). Le quaternion de norme 1 image par $\mu$ de l'elgna de $r$ est le carré des quaternions de norme 1 antécédents de $r$ par l'homomorphisme standard du groupe des quaternions de norme 1 sur $\mathrm{SO}(3)$.
5°) Tout cela est bien beau, mais qu'est-ce qu'on en fait ? Rien à mon avis, puisque les applications définies plus haut ne préservent pas les opérations naturelles qu'on a sur les rotations, les elgnas, les quaternions de norme 1. -
Hihihi.
J'ai mis un temps à trouver l'étymologie de "elgna".
[small](Quelques coquilles se baladent)[/small] mais c'est bien plaisant ! -
Un grand merci à GaBuZoMeu qui a fait un grand effort pour me comprendre (ou peut être pas grand parce qu'il a le don).
Tout ce que tu as écrit dans ton dernier message est conforme à ce que je voulais dire (sauf pour $\mu(\epsilon(u,u))=-1$ qui est juste une erreur de frappe)
Pour l’appellation elgnas je suis d'accord car $\mu$ n'est pas un isomorphisme (ils ne servent à rien à présent).
Mais si on revient à mes messages précédents j'ai jamais dit isomorphisme (plutôt bijection),
et dans l'un de mes messages http://www.les-mathematiques.net/phorum/read.php?8,1320162,1321034#msg-1321034 c'est à dire :
Je suis vraiment rassuré parce que je suis convaincu qu'ils marcheront.
GaBuZoMeu tu sera le premier à lire mon premier article sur les elgnas et je vais les appeler vecteurs sphériques. -
L2M écrivait:
> Avec un simple changement dans la
> définition des elgnas on tombera dans un
> isomorphisme de groupe je vais le noter $e$ et
> noter un elgnas par $\vec{uv}$ et on démontre que
> :
> $e^{\vec{uv}}e^{\vec{vw}}=e^{\vec{uv}+\vec{vw}}=e^{\vec{uw}}$.
>
> Je suis vraiment rassuré parce que je suis
> convaincu qu'ils marcheront.
>
Tu peux toujours réver. Mais tu ferais mieux de redescendre sur terre pour vérifier qu'il n'y a aucune chance que ça marche. Bon , tu ne seras pas le premier à te fiche dedans avec les quaternions. -
Est-ce que c'est simple de vérifier qu'ils ne marcheront pas ? Et comment ?







Connectez-vous ou Inscrivez-vous pour répondre.
Bonjour!
Catégories
- 163.1K Toutes les catégories
- 7 Collège/Lycée
- 21.9K Algèbre
- 37.1K Analyse
- 6.2K Arithmétique
- 52 Catégories et structures
- 1K Combinatoire et Graphes
- 11 Sciences des données
- 5K Concours et Examens
- 11 CultureMath
- 47 Enseignement à distance
- 2.9K Fondements et Logique
- 10.3K Géométrie
- 62 Géométrie différentielle
- 1.1K Histoire des Mathématiques
- 68 Informatique théorique
- 3.8K LaTeX
- 39K Les-mathématiques
- 3.5K Livres, articles, revues, (...)
- 2.7K Logiciels pour les mathématiques
- 24 Mathématiques et finance
- 312 Mathématiques et Physique
- 4.9K Mathématiques et Société
- 3.3K Pédagogie, enseignement, orientation
- 10K Probabilités, théorie de la mesure
- 772 Shtam
- 4.2K Statistiques
- 3.7K Topologie
- 1.4K Vie du Forum et de ses membres
In this Discussion
Qui est en ligne 2
2 Invités